Robot explanatory narratives of collaborative and adaptive experiences
Abstract
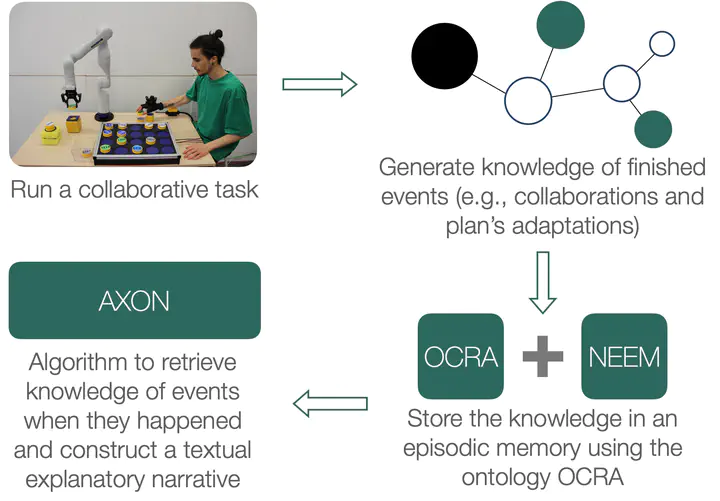
In the future, robots are expected to autonomously interact and/or collaborate with humans, who will increase the uncertainty during the execution of tasks, provoking online adaptations of robots’ plans. Hence, trustworthy robots must be able to store, retrieve and narrate important knowledge about their collaborations and adaptations. In this article, it is proposed a sound methodology that integrates three main elements. First, an ontology for collaborative robotics and adaptation to model the domain knowledge. Second, an episodic memory for time-indexed knowledge storage and retrieval. Third, a novel algorithm to extract the relevant knowledge and generate textual explanatory narratives. The algorithm produces three different types of outputs, varying the specificity, for diverse uses and preferences. A pilot study was conducted to evaluate the usefulness of the narratives, obtaining promising results. Finally, we discuss how the methodology can be generalized to other ontologies and experiences. This work boosts robot explainability, especially in cases where robots need to narrate the details of their short and long-term past experiences.